本文是对条件随机场的简单介绍,主要基于 Conditional Random Fields: An Introduction [pdf] 这篇文章,作者是 Hanna M. Wallach。
为什么用 CRF 做序列标注
HMM 定义联合概率分布 $p(X, Y)$,其中 $X, Y$ 取遍所有观测序列和相应的标签序列。假定任意时刻的观测结果只和该时刻的状态(标签)相关,忽略多元关系和长程关系。
一个解决办法是避免对全体 $X$ 建模,只对特定的观测序列 $x$ 进行标注。引入条件概率 $p(Y \mid x)$,对它进行标注就是求 $y^{\star} = \mathrm{argmax}_y p(y \mid x)$。 显然,这意味着 CRF 不是一个生成模型,而是判别模型。
它的优点是:条件概率放松了 HMM 的独立性假定;全局归一化避免了 MEMM 的 label bias 问题。
CRF 的无向图模型
给定一个观测序列,定义在标签序列上的 log-linear 分布。
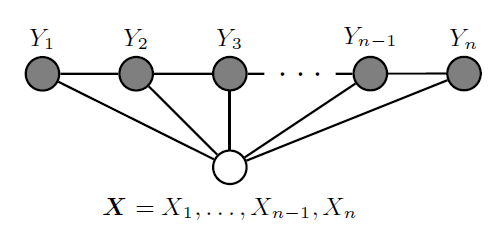
在无向图 $G = (V,E)$ 上,每个 $v \in V$ 对应一个标签,且满足马尔可夫性质。 利用图结构,将 $Y_v$ 的联合概率分布分解为势函数的乘积(并经过归一化)。
在序列(即线性链)中,马尔可夫性质是指每个 $Y_i$ 只与 $Y_{i-1}$ 有关,与其他的 $Y_j$ 都无关。于是,势函数只依赖相邻的标签变量 $Y_i$ 和 $Y_{i-1}$。
CRF 条件随机场
令 $\lambda$ 表示待估计的参数,
其中 $Z(x)$ 是归一化因子; $F_j(y, x) = \sum_i f_j(y_{i-1}, y_i, x, i)$ ,每个 $f_j$ 可以是状态特征函数 $s(y_i, x, i)$ 或者转移特征函数 $t(y_{i-1}, y_i, x, i)$,通常是取值为0或1的示性函数,表示某个特征是否出现。
例如,可以定义 $t(y_{i-1},y_i,x,i)$ 在 $y_{i-1}=\mbox{IN}$ 且 $y_i=\mbox{NNP}$ 且 $x_i=\mbox{‘September’}$ 时取值为1,否则取值为0。
最大熵
从有限的训练数据估计概率分布,最大熵原则:从不完全信息中得出的概率分布应当使熵最大化(在服从给定的约束的前提下)。
在这里,给定的约束就是:每个特征函数在模型分布上的期望应当等于在数据上观测到的期望。
参数的最大似然估计
对于训练数据 ${(x^{(k)}, y^{(k)})}$,假定它们独立同分布,似然(likelihood)等于
取对数,得到 对数似然
对参数分量求微分,
其中 $\tilde{p}(Y, X)$ 是观测分布,$E_p[f]$ 是 $f$ 在分布 $p$ 上的期望。令上式为 0 就得到最大熵模型约束。
这个优化问题没有分析解,可以通过迭代的方法求近似解。
矩阵计算
给定观测序列,计算标签序列的概率时,我们希望计算归一化因子 $Z$,可以利用矩阵提高计算效率,具体过程此处从略。
动态规划
在估计参数时,我们希望对每个观测序列计算各个特征函数的期望,可以利用动态规划,类似于 HMM 的前向后向算法,具体过程此处从略。